 KALİBRASYON LABORATUVARI
KALİBRASYON LABORATUVARIArka Plan
Modern navigasyon sistemleri, performansı ve güvenilirliği artırmak için birden çok konuma duyarlı sensörü entegre eder. Pendulum’un GSG serisi gibi GPS RF simülatörleri, araç dinamikleri dahil hemen hemen her koşula karşılık gelen sinyaller üreterek bir GPS / GNSS alıcısının nav sistemine entegrasyonunu test edebilir. Ayrıca kapsamlı bir sistem testi için diğer sensörler için sinyaller üretebilirler. Simülatör, belirli bir yörünge için navigasyon uydu verilerini oluştururken, aynı anda konum ve konum verilerini gerçek zamanlı olarak altı serbestlik derecesinde hesaplar; ileri / geri savaş, sol / sağ ve yukarı / aşağı ve ayrıca üç dikey eksen, eğim, sapma ve yuvarlanma ile ilgili dönüşler.Bu özellik, Sensör Simülasyonu seçeneği (OPT-SEN) veya Gerçek Zamanlı Senaryo seçeneği (OPT-RSG) ile etkinleştirilen 16 kanallı veya daha yüksek GSG5 veya 6 serileriyle kullanılabilir.
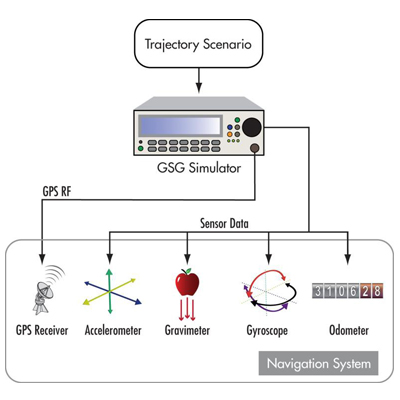
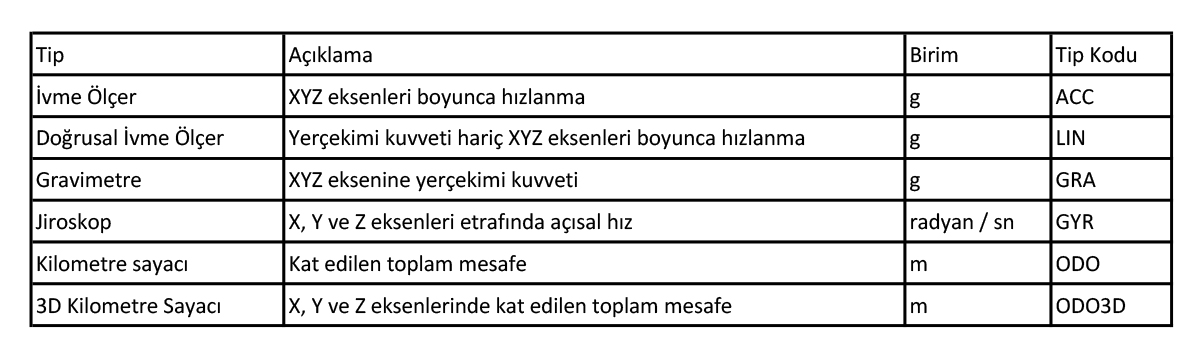
Simüle Edilen Sensörler
Simüle Sensörleri Yapılandırma
Sensör çıkışı, protokol komutları kullanılarak başlatılır. Çeşitli sensör çıkışı türleri, ayrı ayrı "abone olunur". Her sensör başlangıçta monte edilir / kalibre edilir, böylece XYZ koordinat sistemi kullanıcının yerel doğu, kuzey, yukarı (ENU) koordinat sistemiyle hizalanır. İstenilen sensörü etkinleştirmek için SOURce:SCENario:SENSor:REGister komutunu gönderin. Bu, GSG StudioView Windows uygulama konsolu kullanılarak gerçekleştirilebilir. Komut başına bir sensör kaydedilebilir, ancak komutlar noktalı virgül “;” ile ayrılmış olarak aynı anda gönderilebilir.
Örneğin;
SOUR:SCEN:SENS:REG ACC;SOUR:SCEN:SENS:REG LIN;SOUR:SCEN:SENS:REG GRA;SOUR:SCEN:SENS:REG GYR;SOUR:SCEN:SENS:REG ODO;SOUR:SCEN:SENS:REG ODO3D
SOURce: SCENa io: SENSor: REGi ter? . Sensörün kaydedildiğini doğrulamak için sorgusunu kullanın. (İsteğe bağlı)
Sensör verilerini sorgulayın
SOURce: SCENa io: SENSor: DATa sorgusu? sensör verilerini alır. Kayıtlı tüm sensörler için veriler elde edilecektir. Sensörler, kaydedildikleri sıraya göre listelenecektir. Veriler maksimum 10Hz hızında (saniyede 10 kez) sorgulanabilir.
Bu sorgu, tüm sensörlerin kaydedildiği statik bir simülasyon üzerinde yapılmıştır.
> query SOUR:SCEN:SENS:DAT?
Accel: -0, -0, -1
LinearAccel: -0, -0, -0
Gravimeter: -0, -0, -1
Gyro: 0, 0, 0
Odometer: 0
Odometer3d: 0, 0, 0
Yerçekimi kuvvetinden etkilenenler dışında tüm değerler sıfırdır. İvmeölçer ve Gravimetre için Z ekseni -1g veya 1 x yerçekimi kuvvetine ayarlanmıştır.
Bu sorgu, 5000 m çapında ve 5 m / s hıza sahip yerleşik "Daire" yörüngesini çalıştıran bir birim üzerinde yapıldı.
>query SOUR:SCEN:SENS:DAT?
Accel: -0.00101967, -1.82769e-07, -1
LinearAccel: -0.00101967, -1.82769e-07, 3.95651e-07
Gravimeter: -0, -0, -1
Gyro: 0, 0, 0.002
Odometer: 69.5
Odometer3d: 39.6406, 57.0857, 3.52458e-05
Verileri Normalleştirme
Mevcut tüm sensörler normalleştirilebilir, böylece çıktı her zaman beklenen aralıkta olur. Bu, bilinen bir ölçüm aralığına sahip bir sensörü simüle etmeye çalışırken kullanışlıdır. Normalleştirmeyi etkinleştirmek için önce aralığı ayarlayın ve ardından bu sensör için normalizasyonu açın.
Bu sorgu, 5.000 metre çapında ve 500 m / s hıza sahip yerleşik "Circle" yörüngesini çalıştıran bir birim üzerinde yapıldı. Hiçbir sensör normalleştirilmedi.
>query SOUR:SCEN:SENS:DAT?
Accel: -3.67067, -0.0440501, -0.998568
LinearAccel: -3.67067, -0.0440501, 0.00143185
Gravimeter: -0, -0, -1
Gyro: 0, 0, 0.12
Odometer: 3899.44
Odometer3d: 845.501, 3770.77, 0.120117
Bir ivmeölçerin ölçüm aralığı +/- 3g ise, maksimum aralığı 3g ve minimum aralığı -3g olarak ayarlayın.
write SOUR:SCEN:SENS:MAX ACC, 3
Sensör verileri de normalleştirilebilir, yani çıktı değerleri +/- 1 aralığında tutulur, burada 1 maksimuma karşılık gelir
aralık kümesi. Maksimum aralık ayarlanmadıysa, normalize komutunun hiçbir etkisi olmayacaktır.
write SOUR:SCEN:SENS:NORM ACC, ON
İvme ölçer artık normalize edildiğinde ve maksimum aralığı olarak 3g ayarlandığında, yukarıdaki ile aynı "Circle" yörüngesi için aşağıdaki çıktıyı elde ederiz.
>query SOUR:SCEN:SENS:DAT?
Accel: -1, -0.0146834, -0.332854
LinearAccel: -3.67067, -0.0440501, 0.00143754
Gravimeter: 0, -0, -1
Gyro: 0, 0, 0.12
Odometer: 3869.44
Odometer3d: 943.521, 3695.59, 0.117922
Kayıtsız Sensörler
Sensörler yalnızca kayıt silme komutu verilerek kayıt silinebilir. GSG simülatörüne bir sensör kaydedildiğinde, kayıt silme komutu verilene kadar kayıtlıdır. Fabrika varsayılanlarının geri yüklenmesi sensörlerin kaydını silmez. Kayıt gibi, kayıt silme komutları her sensör için bir tane verilir, ancak noktalı virgül ";" kullanılarak tek bir yazımda verilebilir.
write SOUR:SCEN:SENS:UNREG ACC;SOUR:SCEN:SENS:UNREG LIN;SOUR:SCEN:SENS:UNREG GRA;SOUR:SCEN:SENS:UNREG GYR;SOUR:SCEN:SENS:UNREG ODO;SOUR:SCEN:SENS:UNREG ODO3D